Sagedusmuundur - tüübid, tööpõhimõte, ühendusskeemid
 Mis tahes elektrimootori rootorit juhivad jõud, mis on põhjustatud staatori mähises pöörlevast elektromagnetväljast. Selle kiiruse määrab tavaliselt elektrivõrgu tööstuslik sagedus.
Mis tahes elektrimootori rootorit juhivad jõud, mis on põhjustatud staatori mähises pöörlevast elektromagnetväljast. Selle kiiruse määrab tavaliselt elektrivõrgu tööstuslik sagedus.
Selle standardväärtus 50 hertsi tähendab 50 võnkeperioodi ühes sekundis. Ühe minutiga suureneb nende arv 60 korda ja on 50×60 = 3000 pööret. Rootor pöörleb rakendatud elektromagnetvälja mõjul sama palju kordi.
Kui muudate staatorile rakendatava võrgusageduse väärtust, saate reguleerida rootori ja sellega ühendatud ajami pöörlemiskiirust. See põhimõte on elektrimootorite juhtimise aluseks.
Sagedusmuundurite tüübid
Disaini järgi on sagedusmuundurid järgmised:
1. induktsioontüüp;
2. elektrooniline.
Toodetud asünkroonsed mootorid vastavalt skeemile faasirootoriga ja käivitati generaatorirežiimis, on esimese tüübi esindajad. Töötamise ajal on neil madal efektiivsus ja neid iseloomustab madal efektiivsus.Seetõttu pole need tootmises laialdast rakendust leidnud ja neid kasutatakse äärmiselt harva.
Elektrooniline sagedusmuundamismeetod võimaldab sujuvalt reguleerida nii asünkroonsete kui sünkroonsete masinate kiirust. Sel juhul saab rakendada ühte kahest kontrollipõhimõttest:
1. Pöörlemiskiiruse sõltuvuse sagedusest (V / f) etteantud tunnuse järgi;
2. vektorkontrolli meetod.
Esimene meetod on kõige lihtsam ja vähem täiuslik ning teist kasutatakse kriitiliste tööstusseadmete pöörlemiskiiruste täpseks juhtimiseks.
Sagedusmuundusvektori juhtimise omadused
Selle meetodi erinevus seisneb interaktsioonis, muunduri juhtseadme mõjus rootorivälja sagedusega pöörleva magnetvoo "ruumivektorile".
Sellel põhimõttel töötavate muundurite algoritmid luuakse kahel viisil:
1. sensorita juhtimine;
2. voolu reguleerimine.
Esimene meetod põhineb teatud sõltuvuse määramisel järjestuste vaheldumisest impulsi laiuse modulatsioon (PWM) inverter eelseadistatud algoritmide jaoks. Sel juhul juhitakse muunduri väljundpinge amplituudi ja sagedust libisemisvoolu ja koormuse abil, kuid ilma rootori kiiruse tagasisidet kasutamata.
Seda meetodit kasutatakse mitme sagedusmuunduriga paralleelselt ühendatud elektrimootori juhtimisel.Voo juhtimine hõlmab mootori sees olevate töövoolude jälgimist koos nende lagunemisega aktiivseteks ja reaktiivseteks komponentideks ning muunduri töö reguleerimist, et määrata väljundpinge vektorite amplituudi, sageduse ja nurga all.
See parandab mootori täpsust ja suurendab selle reguleerimise piire. Voolu reguleerimise kasutamine laiendab madalatel kiirustel ja suure dünaamilise koormusega ajamite, näiteks kraanatõstukid või tööstuslikud mähismasinad, võimalusi.
Vektortehnoloogia kasutamine võimaldab rakendada dünaamilist pöördemomendi juhtimist kolmefaasilised asünkroonsed mootorid.
Samaväärne vooluring
Asünkroonmootori põhilist lihtsustatud elektriskeemi saab kujutada järgmiselt.
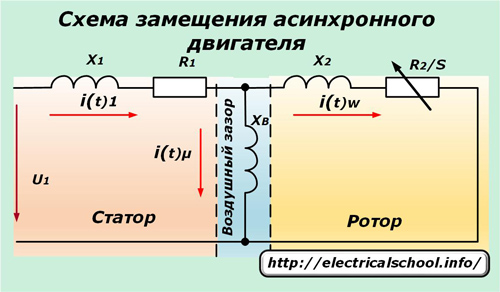
Staatori mähistele, millel on aktiivtakistus R1 ja induktsioontakistus X1, rakendatakse pinge u1. See, ületades õhupilu Xv takistuse, muundatakse rootori mähiseks, põhjustades selles voolu, mis ületab selle takistuse.
Vektorahela ekvivalentahel
Selle konstruktsioon aitab mõista asünkroonmootoris toimuvaid protsesse.

Staatori voolu energia jaguneb kaheks osaks:
-
iµ — voolu moodustav vahesein;
-
iw — momenti genereeriv komponent.
Sel juhul on rootoril libisemisest sõltuv aktiivne takistus R2 / s.
Andurita juhtimise korral mõõdetakse järgmist:
-
pinge u1;
-
praegune i1.
Vastavalt oma väärtustele arvutavad nad:
-
iµ – voolu moodustav voolukomponent;
-
iw — väärtust genereeriv pöördemoment.
Arvutusalgoritmis on nüüd vooluregulaatoritega asünkroonmootori elektrooniline ekvivalentskeem, mis võtab arvesse elektromagnetvälja küllastustingimusi ja magnetenergia kadusid terases.
Vooluvektorite mõlemad nurga ja amplituudi poolest erinevad komponendid pöörlevad koos rootori koordinaatsüsteemiga ja muutuvad statsionaarseks staatori orientatsioonisüsteemiks.
Selle põhimõtte kohaselt reguleeritakse sagedusmuunduri parameetreid vastavalt asünkroonmootori koormusele.
Sagedusmuunduri tööpõhimõte
See seade, mida nimetatakse ka inverteriks, põhineb toiteallika lainekuju kahekordsel muutumisel.
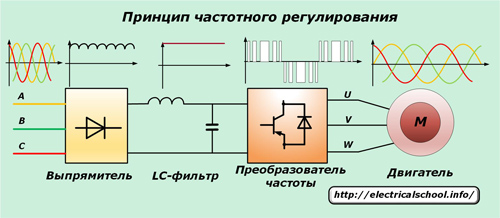
Algselt juhitakse tööstuslik pinge alaldi võimsate dioodidega, mis eemaldavad sinusoidsed harmoonilised, kuid jätavad signaali pulsatsiooni. Nende eemaldamiseks on ette nähtud induktiivsusega kondensaatoripank (LC-filter), mis annab alaldatud pingele stabiilse, silutud kuju.
Seejärel läheb signaal sagedusmuunduri sisendisse, mis on kuuest koosnev kolmefaasiline sildlülitus jõutransistorid Pöördpolaarsusega pingekaitsedioodidega IGBT või MOSFET seeria. Varem sel eesmärgil kasutatud türistorid ei ole piisava kiirusega ja töötavad suurte häiretega.
Mootori "piduri" režiimi sisselülitamiseks saab ahelasse paigaldada võimsa takistiga juhitava transistori, mis hajutab energiat. See tehnika võimaldab eemaldada mootori tekitatud pinge, et kaitsta filtrikondensaatoreid ülelaadimise ja kahjustuste eest.
Konverteri vektorsageduse juhtimismeetod võimaldab luua ahelaid, mis teostavad ACS-süsteemide signaali automaatset juhtimist. Selleks kasutatakse juhtimissüsteemi:
1. amplituud;
2. PWM (impulsi laiuse simulatsioon).
Amplituudi reguleerimise meetod põhineb sisendpinge muutmisel ja PWM toitetransistoride konstantsel sisendpingel lülitamise algoritmil.
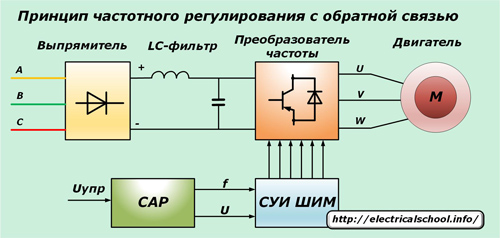
PWM-reguleerimisega luuakse signaali modulatsiooni periood, kui staatori mähis on ranges järjekorras ühendatud alaldi positiivsete ja negatiivsete klemmidega.
Kuna generaatori taktsagedus on üsna kõrge, siis induktiivse takistusega elektrimootori mähises silutakse need tavaliseks siinuslaineks.
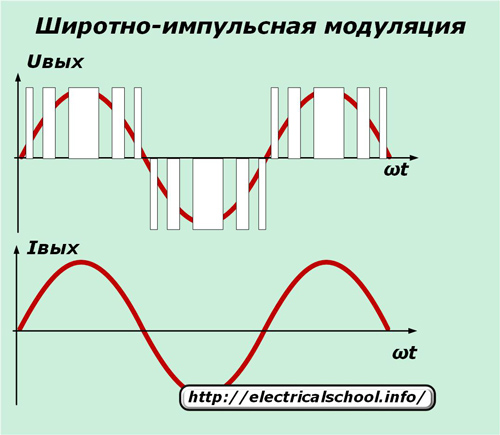
PWM-juhtimismeetodid maksimeerivad energiakadude kõrvaldamist ja tagavad kõrge muundamise efektiivsuse tänu samaaegsele sageduse ja amplituudi juhtimisele. Need on muutunud kättesaadavaks tänu GTO-seeria toitelukuga türistori juhtimistehnoloogiate või isoleeritud väravaga IGBT-transistoride bipolaarsete kaubamärkide arendamisele.
Nende kolmefaasilise mootori juhtimiseks kaasamise põhimõtted on näidatud fotol.
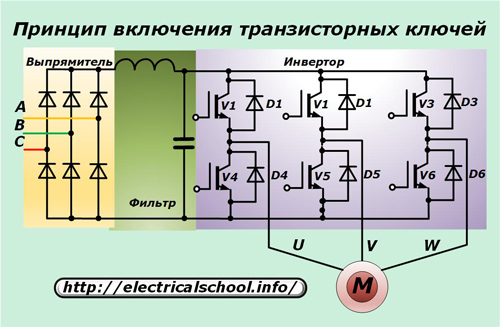
Kõik kuus IGBT-d on antiparalleelses ahelas ühendatud oma pöördvooludioodiga. Sel juhul läbib asünkroonmootori aktiivne vool iga transistori toiteahelat ja selle reaktiivne komponent suunatakse läbi dioodide.
Et välistada välise elektrimüra mõju muunduri ja mootori tööle, võib sagedusmuunduri vooluring sisaldada müra vähendamise filterlikvideerimine:
-
raadiohäired;
-
tööseadmetest põhjustatud elektrilahendused.
Nendest annab märku kontroller ning mootori ja muunduri väljundklemmide vahel kasutatakse löögi vähendamiseks varjestatud juhtmeid.
Asünkroonsete mootorite töö täpsuse parandamiseks sisaldab sagedusmuundurite juhtimisahel:
-
sidesisend koos täiustatud liidese võimalustega;
-
sisseehitatud kontroller;
-
mälukaart;
-
tarkvara;
-
informatiivne LED-ekraan, mis näitab peamisi väljundparameetreid;
-
pidurilõikur ja sisseehitatud EMC-filter;
-
vooluringi jahutussüsteem, mis põhineb puhumisel suurenenud ressursi fännidega;
-
mootori alalisvooluga soojendamise funktsioon ja mõned muud võimalused.
Toimimisskeemid
Sagedusmuundurid on ette nähtud töötamiseks ühefaasiliste või kolmefaasiliste võrkudega. Kui aga on olemas tööstuslikud alalisvooluallikad pingega 220 volti, siis saab invertereid neist toita.

Kolmefaasilised mudelid on mõeldud võrgupingele 380 volti ja toidavad seda elektrimootorile. Ühefaasilised inverterid saavad toite 220 voltiga ja väljastavad kolm faasi, mis on aja peale jaotatud.
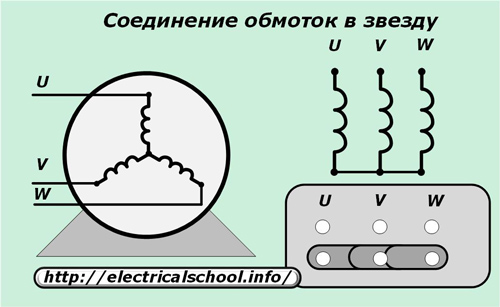
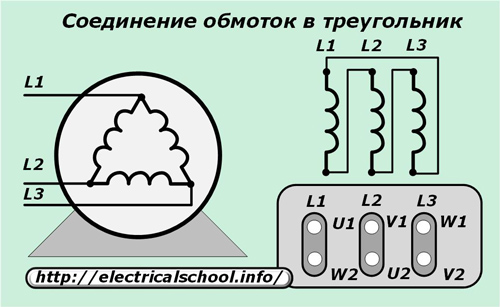
Sagedusmuunduri ühendamise skeemi mootoriga saab läbi viia vastavalt skeemidele:
-
tähed;
-
kolmnurk.
Mootori mähised on monteeritud muunduri "täheks", mida toidab kolmefaasiline 380-voldine võrk.
"Delta" skeemi kohaselt on mootori mähised kokku pandud, kui võimsusmuundur on ühendatud ühefaasilise 220-voldise võrguga.
Elektrimootori sagedusmuunduriga ühendamise meetodi valimisel peate pöörama tähelepanu võimsussuhtele, mida töötav mootor suudab luua kõigis režiimides, sealhulgas aeglasel, koormatud käivitamisel, inverteri võimalustega.
Sagedusmuundurit on võimatu pidevalt üle koormata ning selle väljundvõimsuse väike reserv tagab selle pikaajalise ja tõrgeteta töö.