Staatilised koormused peamiste kraanamehhanismide mootoritele
Kraanatõstuki mootorivõlli võimsust ja pöördemomenti koormuse tõstmise staatilises režiimis saab arvutada valemite abil
kus P on mootori võlli võimsus, kW; G on koormuse tõstmiseks vajalik jõud N; G0 — haardeseadme tõstejõud, N; M on mootori võlli moment, Nm; v on koorma tõstmise kiirus, m / s; D on pukseerimisvintsi trumli läbimõõt, m; η — tõstemehhanismi efektiivsus; i on käigukasti ja ketttõstuki ülekandearv.
Laskumisrežiimis arendab kraana mootor võimsust, mis võrdub hõõrdejõu Ptr ja laskuva koormuse raskuse Pgr mõjul võimsuse vahega:
Keskmiste ja raskete koormuste langetamisel suunatakse energia ülekandevõllilt mootorile, sest Pgr >> Ptr (pidurivabastus). Sel juhul väljendatakse mootori võlli võimsust kW valemiga

Kergete koormate või tühja konksu langetamisel võib esineda juhtumeid, kus Pgr < Ptr.Sel juhul töötab mootor liikumismomendiga (võimsuse langus) ja arendab võimsust, kW,

Antud valemite alusel on võimalik määrata kraana mootori võimsust konksu mis tahes koormuse korral. Arvutamisel tuleb meeles pidada, et mehhanismi efektiivsus sõltub selle koormusest (joonis 1).
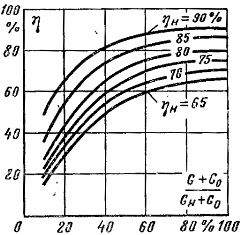
Riis. 1. Mehhanismi efektiivsuse sõltuvus koormusest.
Kraana staatilises töörežiimis liikumise horisontaalmehhanismide mootorite võimsust ja pöördemomenti saab määrata valemitega

kus P on kraana liikumismehhanismi mootori võlli võimsus, kW; M on liikumismehhanismi mootori võlli moment Nm; G — veetava kauba kaal, N; G1 — liikumismehhanismi omakaal, N; v — liikumiskiirus, m/s; R on ratta raadius, m; r on rattatelje kaela raadius, m; μ — libisemishõõrdetegur (μ = 0,08-0,12); f — veerehõõrdetegur, m (f = 0,0005 — 0,001 m); η — liikumismehhanismi efektiivsus; k — rööbaste rattaäärikute hõõrdumise koefitsient; i — veermiku reduktori ülekandearv.
Paljude tõste- ja transpordimehhanismide puhul ei toimu liikumine horisontaalsuunas. Võimalik on ka tuulekoormuse vms mõju. Võimsuse määramise valemit võib sel juhul esitada kui

Lisaks märgitakse: α — juhikute kaldenurk horisontaaltasapinna suhtes; F — tuule erikoormus, N / m2; S on ala, millel tuule rõhk mõjub 90 ° nurga all, m2.
Viimases valemis iseloomustab esimene liige mootori võlli võimsust, mis on vajalik hõõrdumise ületamiseks horisontaalse liikumise ajal; teine liige vastab tõstejõule, kolmas on tuulekoormusest tulenev võimsuskomponent.
Mitmel kraanal on pöördlaud, millel asuvad tööseadmed. Platvormi liikumine edastatakse hammasratta (pöördlaua) kaudu, millele on paigaldatud läbimõõt Dkp. Platvormi ja fikseeritud aluse vahel on rullid (rullikud) läbimõõduga dp. Sel juhul leitakse hõõrdejõududest tingitud kraana mootori võimsus ja pöördemoment sarnaselt edasi-tagasi liikumise korral, nimelt:

Siin lisaks teadaolevatele väärtustele: G2 on pöördlaua kaal koos kogu sellel oleva seadmega, N; ωl — nurkkiirus, platvormid, rad/sek; sisse — pöördmehhanismi käigukasti ja käigukasti ajami ülekandearv — pöördlaud.

Kraana elektriajami võimsuse määramisel tuleb mõnel juhul kallakul töötamisel arvestada koormuse muutusega. Tuulekoormus pöörlevatele mehhanismidele määratakse, võttes arvesse koormusele, kraana noolele ja vastukaalule mõjuvate tuulejõudude erinevust.
Kraanamehhanismide elektriajamite projekteerimisel kontrollitakse mootori valiku lõpus elektriajami lubatud kiirendusväärtusi, mille andmed on toodud tabelis 1
Tabel 1 Mehhanismide nimetused ja otstarve
Mehhanismide nimetus ja otstarve Kiirendus, m/s2 Vedelmetallide, habraste esemete, toodete, erinevate montaažitööde tõstmiseks mõeldud tõstemehhanismid 0,1 Montaaži- ja metallurgiatöökodade parkide tõstemehhanismid 0,2 — 0,5 Haardekraanade tõstemehhanismid 0,8 Mehhanismid kraanade liikumine, mis on ette nähtud täppismontaažitöödeks ja vedelate metallide, habraste esemete transportimiseks 0,1 - 0,2 Liikumismehhanismid raskusjõu külgetõmbejõuga täisvõimsusel 0,2 - 0,7 Full Grip Kraanakärud 0,8 - 1,4 Kraana pöörded 0,5 - 1,2