Liftide ja tõstemasinate mootorite valik võimsuse järgi
 Kaasaegsed elu- ja haldushoonete reisi- ja kaubaliftid, samuti mõned miinide tõstmise masinad on teostatud vastukaaluga või, nagu mõnikord nimetatakse, vastukaaluga. Kaevandusmasinate puhul toimub tasakaalustamine, nagu juba märgitud, sageli mitte vastukaalu, vaid teise tõstealuse abil.
Kaasaegsed elu- ja haldushoonete reisi- ja kaubaliftid, samuti mõned miinide tõstmise masinad on teostatud vastukaaluga või, nagu mõnikord nimetatakse, vastukaaluga. Kaevandusmasinate puhul toimub tasakaalustamine, nagu juba märgitud, sageli mitte vastukaalu, vaid teise tõstealuse abil.
Lifti vastukaal valitakse nii, et see tasakaalustaks tõstelaeva (kabiini) kaalu ja osa tõstetavast nimikoormusest:

kus GH on nominaalse tõstekoormuse kaal, N; G0 — salongi mass, N; Gnp on vastukaalu kaal N; α on tasakaalustustegur, tavaliselt 0,4-0,6.
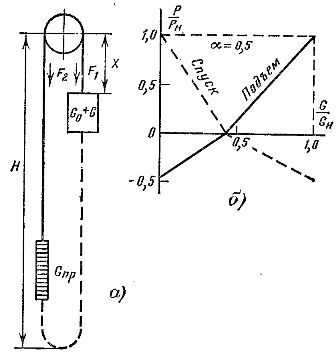
Riis. 1. Lifti mootori võlli koormuse arvutamiseks.
Raskete laevade tasakaalustamise vajadus on ilmne, kuna nende liigutamiseks vastukaalu puudumisel on vaja mootori võimsust vastavalt suurendada. Võimalus tasakaalustada osa nimikoormusest ilmneb antud koormuskõvera ekvivalentvõimsuse määramisel.Pole raske jälgida näiteks seda, et kui lift töötab peamiselt koorma tõstmiseks ja tühja kabiini langetamiseks, siis koormusdiagrammi järgi ekvivalentne mootorivõimsus on α = 0,5 juures miinimum.
Vastukaalu olemasolu põhjustab mootori koormuskõvera lamenemise, mis vähendab selle kuumenemist töötamise ajal. Viidates joonisel fig. 1, a, siis koos vastukaalu kaalu väärtusega

ja tasakaalustustrossi ja kabiini hõõrdumise ning juhikute vastukaalu puudumisel võite kirjutada:


kus gk on 1 m köie kaal, N / m.
Tõmbetugevus

Mootori võlli pöördemoment ja võimsus määratakse järgmiste valemite alusel:
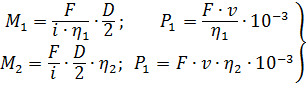
kus M1, P1 — pöördemoment ja võimsus, kui ajami töötab mootorirežiimis, vastavalt Nm ja kW; M2, P2 — pöördemoment ja võimsus, kui ajami töötab generaatorirežiimis, vastavalt Nm ja kW; η1, η2 — tiguülekande efektiivsus otsese ja vastupidise energiaülekandega.
η1 ja η2 väärtused sõltuvad mittelineaarselt tiguvõlli kiirusest ja neid saab arvutada valemite abil

siin λ on spiraalijoone tõusunurk ussi indekseerimissilindril; k1 on koefitsient, mis võtab arvesse kadusid käigukasti laagrites ja õlivannis; ρ — hõõrdenurk, olenevalt tiguvõlli pöörlemiskiirusest.
Veorattale mõjuva jõu valemist järeldub, et tasakaalustustrossi puudumisel sõltub tõstevintsi elektriajamile mõjuv koormus tõstelaeva asendist.
Tänu suurele kandevõimele — kuni 10 tonni, suurele liikumiskiirusele — 10 m/s ja enam, kõrgetele tõstekõrgustele 200–1000 m ja karmidele töötingimustele on kaevandustõstemasinad varustatud suure massiga terastrossidega. Kujutage näiteks ette, et üks läbisõit on langetatud alumisele horisondile, teine on aga üleval ja sel hetkel laaditakse see maha. Selles asendis on kogu peaköis tasakaalust väljas ning tõusu alguses peab mootor ületama koormuse ja trossi raskusest tekkivast staatilisest momendist. Trossi tasakaalustamine toimub möödasõidutee keskel. Siis läheb see uuesti katki ja trossi laskuva osa raskus aitab mootorit maha laadida.
Ebaühtlane laadimine, eriti sügavates kaevandustes, toob kaasa vajaduse mootori võimsust üle hinnata, mistõttu on tõstekõrgusel üle 200-300 m soovitav peatõstetrossid tasakaalustada rippuvate sabatrosside abil. tõstealustest. Tavaliselt valitakse sabaköis sama ristlõike ja pikkusega kui põhi, mille tulemusena osutub tõstesüsteem tasakaalustatuks.
Kuna koormus muutub liftide ja tõstemasinate töötamise ajal, on iga koorma jaoks mootori võlli võimsuse või momendi määramiseks mugav koostada graafik nende väärtuste sõltuvuse kohta koormusest. mitmes punktis, millel on ligikaudu sama iseloom, nagu on näidatud joonisel fig. 1b ja seejärel kasutada seda koormusdiagrammide koostamisel.
Sel juhul peab olema teada tõstemasina elektriajami töörežiim, mille määrab suuresti PV aktiveerimise suhteline kestus ja mootori käivituste arv tunnis. Näiteks liftide puhul määrab elektriajami töörežiimi paigalduskoht ja lifti otstarve.
Elamutes on liiklusgraafik suhteliselt ühtlane ning suhteline kestus — PV ja mootori käivitussagedus h on vastavalt 40% ja 90-120 käivitust tunnis. Kõrghoonetes tõuseb liftide koormus järsult töötajate tööle saabumise ja töölt lahkumise ajal ning vastavalt lõunapausi ajal on kõrgetel väärtustel PV ja h-40-60% ja 150 -200 käivitust tunnis.
Pärast joonise valmimist staatiline koormus mootori võllile, elektriajamisüsteem ja tõstuki mootor on valitud, saab teostada koormusskeemi koostamise teise etapi — arvestades siirde mõju koormusdiagrammile.
Tervikliku koormusdiagrammi koostamiseks on vaja arvestada elektriajami kiirendamise ja aeglustamise aegu, uste avamise ja sulgemise aega, peatumiste arvu auto liikumise ajal, aega reisijate sisenemine ja väljumine kõige tüüpilisema töötsükli jooksul. Automaatselt käitatavate ustega liftidel on uste toimimise ja kabiini täitumise järgi määratud ajakadu kokku 6-8 s.
Auto kiirenduse ja aeglustamise ajad saab määrata liikumisdiagrammilt, kui on teada auto nimikiirus ning kiirenduse (aeglustus) ja tõmbluse lubatud väärtused. Vastavalt elektriajamisüsteemi näidatud staatiliste ja dünaamiliste režiimide järgi koostatud koormusdiagrammile on vaja teha mootori arvutuslik arvutus kuumutamisel, kasutades ühte tuntud meetoditest: keskmised kaod või samaväärsed väärtused.
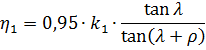
Riis. 2. Elektriajami pöördemomendi sõltuvused auto, lifti koormusest, kui viimane on esimesel korrusel (1), šahti keskel (2) ja viimasel korrusel (3).

Näide. Vastavalt kiirreisijate lifti tehnilistele andmetele määrake staatilised momendid mootori võllil erinevates töörežiimides.
Arvestades:
• maksimaalne kandevõime Gn = = 4900 N;
• liikumiskiirus v = 1 m / s;
• tõstekõrgus H = = 43 m;
• salongi kaal G0 = 6860 N;
• vastukaalu kaal Gnp = 9310 N;
• veotala läbimõõt Dm = 0,95 m;
• vintsi käigukasti ülekandearv i = 40;
• jõuülekande efektiivsus, võttes arvesse kabiini hõõrdumist võllijuhikutele η = 0,6;
• köie kaal GKAH = 862 N.
Tabel 1

Tõmbetugevus:


Kui liftisüsteem töötab, kui Fc > 0, töötab elektriajam mootorirežiimil ja kui Fc on 0, ja mootorirežiimil, kui Fc < 0.
Staatiliste momentide arvutamise tulemused valemi järgi on kokku võetud tabelis. 1 ja on näidatud joonisel fig. 2.Pange tähele, et täpsemate arvutuste tegemisel tuleks arvesse võtta võlli juhikute liikumise takistust, mis on 5-15% Fc-st.