Antialiase filtrid ja pinge stabilisaatorid
 Silumisfiltrid on loodud alaldatud pinge pulsatsiooni vähendamiseks. Ripple silumist hinnatakse silumisteguri q abil.
Silumisfiltrid on loodud alaldatud pinge pulsatsiooni vähendamiseks. Ripple silumist hinnatakse silumisteguri q abil.
Silumisfiltrite põhielemendid on kondensaatorid, induktiivpoolid ja transistorid, mille takistus on alalis- ja vahelduvvoolu korral erinev.
Sõltuvalt filtrielemendi tüübist eristatakse mahtuvuslikke, induktiivseid ja elektroonilisi filtreid. Filtreerimislinkide arvu järgi jagunevad filtrid ühe- ja mitmelingilisteks.
Mahtuvuslik filter on suure mahutavusega kondensaator, mis on ühendatud paralleelselt koormustakistiga Rn. Kondensaatoril on kõrge alalisvoolutakistus ja madal vahelduvvoolutakistus. Vaatleme filtri tööd poollaine alaldi ahela näitel (joonis 1, a).
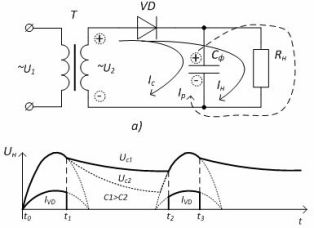
Joonis 1 - Mahtuvusliku filtriga ühefaasiline poollaine alaldi: a) vooluahel b) töö ajastusskeemid
Kui ajavahemikus t0 — t1 (joon. 2.63, b) voolab positiivne poollaine, voolavad koormusvool (dioodivool) ja kondensaatori laadimisvool.Kondensaator laetakse ja hetkel t1 ületab pinge kondensaatoris sekundaarmähise pingelangu — diood sulgub ja ajavahemikus t1 — t2 tagab koormuse voolu kondensaatori tühjenemine. Che. koormuse vool voolab pidevalt, mis vähendab oluliselt alaldatud pinge pulsatsiooni.
Mida suurem on kondensaatori Cf mahtuvus, seda väiksem on ergutus. Selle määrab kondensaatori tühjenemisaeg — tühjendusaja konstant τ = СfRн. Kui τ> 10, määratakse silumiskoefitsient valemiga q = 2π fc m Cf Rn, kus fc on võrgu sagedus, m on alaldatud pinge poolperioodide arv.
Väikese koormusvõimsuse korral on soovitatav kasutada suure takistusega RH koormustakistiga mahtuvuslikku filtrit.
Induktiivne filter (drossel) on ühendatud järjestikku Rn-ga (joonis 3, a). Induktiivsusel on madal alalisvoolutakistus ja kõrge vahelduvvoolutakistus. Ripple silumine põhineb iseinduktsiooni nähtusel, mis esialgu takistab voolu suurenemist, seejärel toetab seda selle vähenemisega (joon. 2, b).
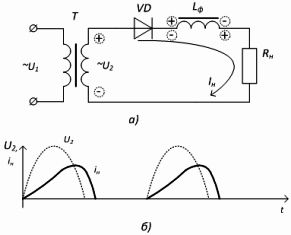
Joonis 2-Induktiivfiltriga ühefaasiline poollaine alaldi: a) vooluahel, b) töö ajastusskeemid
Induktiivfiltreid kasutatakse keskmise ja suure võimsusega alaldites, see tähendab suurte koormusvooludega töötavates alaldis.
Silumiskoefitsient määratakse valemiga: q = 2π fs m Lf / Rn
Mahtuvusliku ja induktiivse filtri töö põhineb asjaolul, et võrgu poolt tarbitava voolu voolamise ajal salvestavad kondensaator ja induktiivpool energiat ning kui võrgust voolu ei tule või see väheneb, annavad elemendid salvestatud energia väljalülitamine, säilitades voolu (pinge) koormuses.
Mitmeühendusega filtrid kasutavad nii kondensaatorite kui ka induktiivpoolide silumisomadusi. Madala võimsusega alaldites, kus koormustakisti takistus on mitu kOhm, on drossel Lf asemel kaasas takisti Rf, mis vähendab oluliselt filtri massi ja mõõtmeid.
Joonisel 3 on näidatud LC- ja RC-redelifiltrite tüübid.
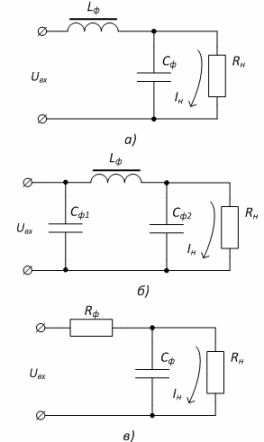
Joonis 3 - Mitme ristmikuga filtrid: a) L-kujuline LC, b) U-kujuline LC, c) RC-filter
Stabilisaatorid on ette nähtud koormuse konstantse pinge (voolu) stabiliseerimiseks võrgupinge kõikumiste ja koormuse poolt tarbitava voolu muutumise ajal.
Stabilisaatorid jagunevad pinge- ja voolustabilisaatoriteks ning parameetrilisteks ja kompenseerivateks. Väljundpinge stabiilsust hinnatakse stabiliseerimisteguriga Kst.
Parameetriline stabilisaator, mis põhineb mittelineaarse karakteristikuga elemendi - pooljuht-zener-dioodi - kasutamisel Zener-dioodi pinge on peaaegu konstantne seadet läbiva pöördvoolu olulise muutusega.
Parameetriline stabilisaatori ahel on näidatud joonisel 4. Sisendpinge UBX jaotub piirava takisti Rlim ja paralleelselt ühendatud zeneri dioodi VD ja koormustakisti Rn vahel.
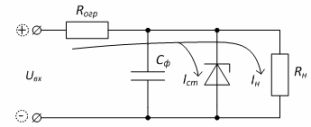
Joonis 4 – parameetriline stabilisaator
Sisendpinge kasvades suureneb zeneri dioodi läbiv vool, mis tähendab, et piiravat takistit läbiv vool suureneb ja sellel tekib suurem pingelang ning koormuspinge jääb muutumatuks.
Parameetrilise stabilisaatori Kst on suurusjärgus 20-50. Seda tüüpi stabilisaatorite puudused on madalad stabiliseerimisvoolud ja madal efektiivsus.
Parameetrilisi stabilisaatoreid kasutatakse abipingeallikatena, samuti kui koormusvool on väike - mitte rohkem kui sadu milliampreid.
Kompenseeriv stabilisaator kasutab piirava takistina transistori muutuvat takistust. Sisendpinge kasvades suureneb ka transistori takistus, vastavalt pinge vähenemisel takistus väheneb. Sellisel juhul jääb koormuse pinge muutumatuks.
Transistoride stabilisaatorahel on näidatud joonisel 5. Väljundpinge URn reguleerimise põhimõte põhineb reguleerimistransistori VT1 juhtivuse muutumisel.
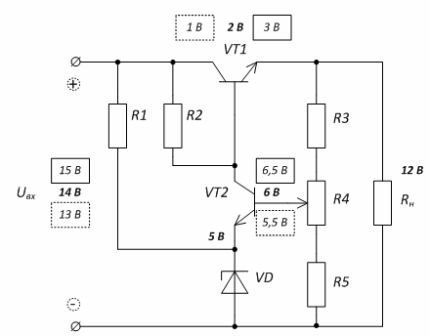
Joonis 5 – kompenseeriva pingeregulaatori skeem
Transistorile VT2 on kokku pandud pinge võrdlusahel ja alalisvoolu võimendi. Mõõteahel R3, R4, R5 sisaldub selle baasahelas ja võrdluspingeallikas R1VD on emitteri vooluringis.
Näiteks sisendpinge kasvades suureneb ka väljund, mis toob kaasa pinge tõusu transistori VT2 aluses, samas kui emitteri VT2 potentsiaal jääb samaks.See toob kaasa baasvoolu suurenemise ja seega ka transistori VT2 kollektorivoolu suurenemise — transistori VT1 baaspotentsiaal väheneb, transistor sulgub ja sellel tekib suurem pingelang ning väljundpinge väheneb. jäävad muutumatuks.
Tänapäeval toodetakse stabilisaatoreid integraallülituste kujul. Tüüpiline integreeritud stabilisaatori sisselülitamise skeem on näidatud joonisel 6.
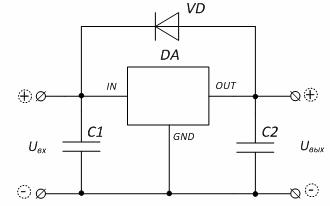
Joonis 6 – tüüpiline skeem sisseehitatud pingestabilisaatori sisselülitamiseks
Stabilisaatori mikroskeemi väljundite tähistus: «IN» — sisend, «OUT» — väljund, «GND» — ühine (case). Kui stabilisaator on reguleeritav, on väljund "ADJ" - reguleerimine.
Stabilisaatori valikul lähtutakse väljundpinge väärtusest, maksimaalsest koormusvoolust ja sisendpinge kõikumise vahemikust.