Digiseadmed: plätud, komparaatorid ja registrid
 Digiseadmed on üles ehitatud loogilistele elementidele, mistõttu nad järgivad loogilise algebra seadusi. Digitehnoloogia põhiseadmed koos loogikaseadmetega on plätud.
Digiseadmed on üles ehitatud loogilistele elementidele, mistõttu nad järgivad loogilise algebra seadusi. Digitehnoloogia põhiseadmed koos loogikaseadmetega on plätud.
Trigger (inglise trigger - trigger) - elektrooniline seade, millel on kaks stabiilset olekut ja mis suudab välise impulsi mõjul ühest olekust teise hüpata.
Päästikuid või täpsemalt trigerisüsteeme nimetatakse suureks elektroonikaseadmete klassiks, millel on võime püsida pikka aega ühes kahest stabiilsest olekust ja neid väliste signaalide mõjul vaheldumisi vahetada. Iga päästikseisund on väljundpinge väärtuse järgi kergesti äratuntav.
Iga päästiku olek vastab teatud (kõrgele või madalale) väljundpinge tasemele:
1) päästik on seatud ühte olekusse — tase «1».
2) flip-flop lähtestatakse — tase «0» väljundis.
Stabiilsusseisund püsib nii kaua kui soovitakse ja seda saab muuta välise impulsi või toitepinge väljalülitamise abil. Che.flip-flop on elementaarne mäluelement, mis on võimeline salvestama väikseima teabeühiku (üks bitt) «0» või «1».
Flip-flops saab ehitada diskreetsetele elementidele, loogikaelementidele, integraallülitustele või olla osa integraallülitusest.
Peamiste plätude tüüpide hulka kuuluvad: RS-, D-, T- ja JK-lestad... Lisaks jagunevad plätud asünkroonseteks ja sünkroonseteks. Asünkroonse käivitamise korral toimub lülitumine ühest olekust teise otse signaali saabumisega infosisendisse. Lisaks andmesisenditele on sünkroniseeritud klambritel ka kellasisend. Nende ümberlülitamine toimub ainult lubava taktimpulsi olemasolul.
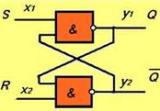
RS-päästikul on vähemalt kaks sisendit: S (seadistatud — seadistatud) — päästik seatakse tasemele «1» ja R (reset) — päästik lähtestatakse tasemele «0». (Joonis 1).
Sisend C juuresolekul on flip-flop sünkroonne — flip-flopi ümberlülitamine (väljundi oleku muutumine) saab toimuda ainult sünkroniseeriva (sünkroniseeriva) impulsi saabumise hetkel sisendisse C.

Joonis 1 – RS-flip-flopi tavapärane graafiline esitus ja järelduste eesmärk a) asünkroonne, b) sünkroon
Lisaks otseväljundile võib flip-flopil olla ka pöördväljund, mille signaal on vastupidine.
Tabelis 1 on näidatud olekud, mida flip-flop võib töö ajal omandada. Tabelis on näidatud sisendsignaalide S ja R väärtused teatud ajahetkel tn ning flip-flopi (otseväljundi) olek järgmisel ajahetkel tn + 1 pärast järgmise saabumist. kaunviljad. Uut päästiku olekut mõjutab ka Q n eelmine olek.
Che.kui on vaja kirjutada trigerile «1» — anname impulsi S sisendile, kui «0» — saadame impulsi R sisendisse.
Kombinatsioon S = 1, R = 1 on keelatud kombinatsioon, kuna on võimatu ennustada, milline olek väljundis luuakse.
Tabel 1 – sünkroonse RS-i flip-flop olekutabel

Flip-flopi tööd saab näha ka ajastusskeemide abil (joonis 2).
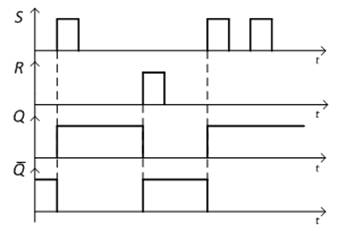
Joonis 2 – asünkroonse RS-flip-flopi ajastusskeemid
D-triggeril (inglise keelest delay — delay) on üks infosisend ja kella (sünkroniseeriv) sisend (joon. 3).
D-flip-flop salvestab ja salvestab väljundis Q signaali, mis oli andmesisendis D taktimpulsi C saabumise hetkel. flip-flop salvestab informatsiooni, mis on kirjutatud, kui C = 1.
Tabel 2 – D-flip-flopi olekute tabel

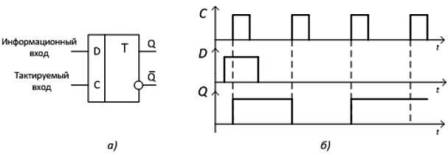
Joonis 3 – D-päästik: a) tavapärane graafiline esitus, b) töö ajastusskeemid
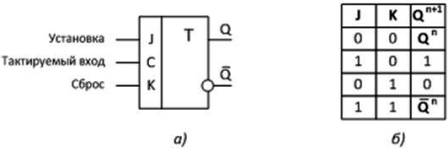
T-triggeritel (inglise keelest tumble — overturning, salto), mida nimetatakse ka loendavateks flip-flopideks, on üks infosisend T. Iga T-sisendi (loendussisend) impulss (impulsi vähenemine) lülitab päästiku vastupidisesse olekusse.
Joonisel 4 on kujutatud T-päästiku sümboolikat (a) ja toimimise ajastusskeeme (b).
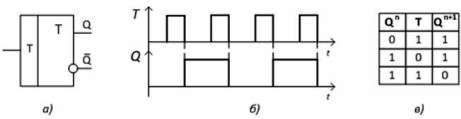
Joonis 4-T-flip-flop a) tavagraafiline tähistus, b) toimimise ajastusskeemid c) olekutabel
JK trigeril (inglise keelest jump — jump, keer — hold) on kaks andmesisendit J ja K ning kellasisend C. Viikude J ja K määramine sarnaneb tihvtide R ja S määramisega, kuid päästikul on keelatud kombinatsioone pole. Kui J = K = 1, muudab see oma oleku vastupidiseks (joonis 5).
Sisendite sobival ühendamisel saab triger täita RS-, D-, T-trigerite funktsioone, s.t. on universaalne päästik.
Joonis 5 -JK -flip-flop a) tavapärane -graafiline tähistus, b) lühendatud olekutabel
Comparator (võrdle — võrdle) — seade, mis võrdleb kahte pinget — sisend Uin referentsiga Uref. Võrdluspinge on positiivse või negatiivse polaarsusega konstantne pinge, sisendpinge ajas muutub. Lihtsaim operatsioonivõimendil põhinev võrdlusahel on näidatud joonisel 6, a. Kui Uin Uop väljundis U — us (joon. 6, b).
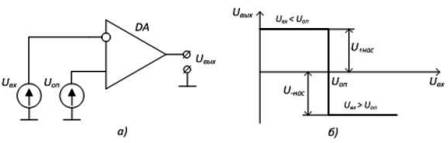
Joonis 6 – Op-amp komparaator: a) lihtsaim skeem b) jõudlusnäitajad
Positiivse tagasiside komparaatorit nimetatakse Schmitti päästikuks. Kui komparaator lülitub "1"-lt "0"-le ja vastupidi samal pingel, siis Schmitti päästik - erinevatel pingetel. Võrdluspinge loob PIC-ahela R1R2, sisendsignaal suunatakse operatiivvõimendi inverteerivasse sisendisse. Joonis 7, b näitab Schmitti päästiku ülekandekarakteristikut.
Negatiivse pinge korral OS-i inventari sisendis Uout = U + sat. See tähendab, et mitteinverteerivale sisendile mõjub positiivne pinge. Sisendpinge kasvades muutub voolutugevus Uin > Uneinv. (Uav — triger) läheb komparaator olekusse Uout = U -sat. Mitteinverteerivale sisendile rakendatakse negatiivne pinge. Vastavalt sellele, sisendpinge vähenemisega hetkel Uin <Uneinv. (Uav — triger) läheb komparaator olekusse Uout = U + sat.
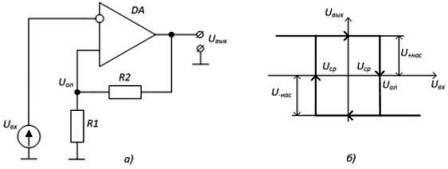
Joonis 7 – operatsioonivõimendi Schmitti töö: a) lihtsaim skeem b) jõudlusnäitajad
Näide. Joonisel 8 on kujutatud elektrimootori juhtimiseks mõeldud relee-kontaktori skeemi, mis võimaldab sellel käivituda, seisata ja tagasi pöörata.
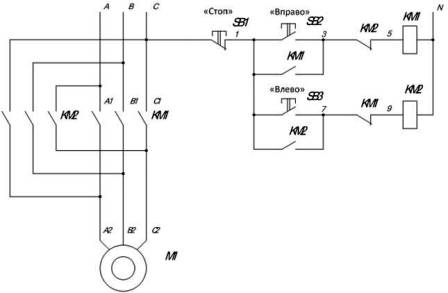
Joonis 8 – Relee-kontaktori mootori juhtimisskeem
Elektrimootori kommutatsiooni teostavad magnetkäivitajad KM1, KM2. Vabalt suletud kontaktid KM1, KM2 takistavad magnetkäivitite samaaegset töötamist. Vabalt avatud kontaktid KM1, KM2 võimaldavad nuppude SB2 ja SB3 iselukustumist.
Töökindluse parandamiseks on vaja relee-kontaktori juhtahelad ja toiteahelad asendada kontaktivaba süsteemiga, mis kasutab pooljuhtseadmeid ja -seadmeid.
Joonisel 9 on kujutatud kontaktivaba mootori juhtimisahel.
Magnetkäivitite toitekontaktid asendati opto-simistoritega: KM1-VS1-VS3, KM2-VS4-VS6. Optosistoride kasutamine võimaldab eraldada nõrkvoolu juhtahela võimsast toiteahelast.
Päästikud pakuvad iselukustuvaid nuppe SB2, SB3. Loogikaelemendid JA tagavad ainult ühe magnetkäiviti samaaegse aktiveerimise.
Transistori VT1 avanemisel liigub vool läbi esimese opto-simistorite grupi VS1-VS3 LED-ide, tagades sellega voolu liikumise läbi mootori mähiste Transistori VT2 avanemine varustab teise rühma optosimistoreid VS4 -VS6, tagades elektrimootori pöörlemise teises suunas.
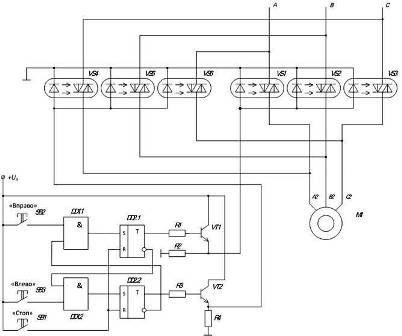
Joonis 9 – kontaktivaba mootori juhtimisahel
Register - elektrooniline seade, mis on mõeldud mitmekohaliste kahendarvude lühiajaliseks salvestamiseks ja teisendamiseks. Register koosneb plätudest, mille arv määrab ära, mitu kahendarvu bitti suudab register talletada — registri suuruse (joon. 10, a). Päästikute töö korraldamiseks saab kasutada loogilisi elemente.
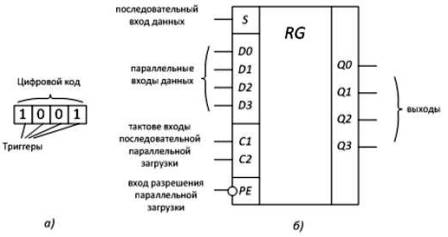
Joonis 10 — register: a) üldine esitus, b) tavapärane graafiline tähistus
Vastavalt teabe sisestamise ja väljastamise meetodile jagatakse registrid paralleel- ja jadaregistriteks.
Järjestikuses registris on klapid ühendatud jadamisi, see tähendab, et eelmise klapi väljundid edastavad informatsiooni järgmise klaveri sisenditesse. Flip-flop kella sisendid C on ühendatud paralleelselt. Sellisel registril on üks andmesisend ja juhtsisend – kellasisend C.
Paralleelregister kirjutab samaaegselt klambritesse, mille jaoks on neli andmesisendit.
Joonisel 10 on kujutatud neljabitise paralleeljada registri UGO ja viigujaotus.