Kompensatsiooniseadmete paigutamine ettevõtete jaotusvõrkudesse
 Reaktiivvõimsuse kompenseerimise vahendite valimisel ja paigutamisel tööstusettevõtete toitesüsteemidesse eristatakse kahte tööstusvõrkude rühma, sõltuvalt nende koormuste koostisest:
Reaktiivvõimsuse kompenseerimise vahendite valimisel ja paigutamisel tööstusettevõtete toitesüsteemidesse eristatakse kahte tööstusvõrkude rühma, sõltuvalt nende koormuste koostisest:
-
esimene rühm - üldotstarbelised võrgud, võrgud, mille põhisagedus on 50 Hz otsejadarežiimiga,
-
teine rühm - spetsiifiliste mittelineaarsete, asümmeetriliste ja järsult muutuvate koormustega võrgud.
Probleemi lahendus reaktiivvõimsuse kompenseerimine teise rühma jaoks on mitmeid omadusi, sealhulgas vajadus esitada elektrikvaliteedi näitajad vajaliku kiirusega elektriliste vastuvõtjate jaoks.
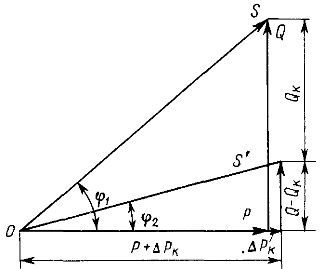
Projektis on suurimad arvutatud aktiiv- ja reaktiivvõimsuse ettevõtted Rcalc ja Qcalc, mis märgivad loodusliku võimsuse tegurit.
Kompensatsiooniseadme tööskeem
Kompensatsiooniseadmete võimsuse määramiseks ei kasutata arvutuslikku võimsust Qcalculated. ja väiksemat väärtust Qswing, võttes arvesse elektrisüsteemi suurima aktiivkoormuse ja tööstusettevõtte suurima reaktiivvõimsuse ajalist lahknevust. Seda lahknevust võetakse arvesse tõusukoefitsiendiga, mille väärtused varieeruvad sõltuvalt sellest, millisesse tööstusharusse ettevõte kuulub, vahemikus 0,75 kuni 0,95. Siis Qswing = kiik Qcalc
Suurima aktiivkoormuse Pcalc ja kogureaktiivse Qmax väärtusi võetakse elektrisüsteemis arvesse, et määrata kindlaks optimaalse majandusliku reaktiivvõimsuse väärtus, mida elektrisüsteem suudab kommunaalteenustele üle kanda kõrgeima ja madalaima režiimi korral. elektrisüsteemi aktiivne koormus, vastavalt Qe1 ja Qe2.
Võimsuse järgi QNSl määratakse kompensatsiooniseadmete koguvõimsus QNS = QmaNS -Qe1 ja võimsusega QNS2 — kompensatsiooniseadmete reguleeritav osa QNSreg=Qe1 — Qe2
Ettevõtte peamiste alajaamade (GSP) madalpingesiinidele paigaldatud kompensatsiooniseadmed mitte ainult ei taga süsteemi cosφsyst võimsusteguri säilitamist, vaid vähendavad ka jõutrafode GPP Str võimsust:

Sellised kompensatsiooniseadmed võivad olla sünkroonkompensaatorid, kondensaatoripangad ja sünkroonmootorid.
Sünkroonkompensaatoreid paigaldatakse ainult suurte tööstusettevõtete gaasiülekandejaamadesse kokkuleppel toitesüsteemiga, sünkroonkompensaatorid aga on elektrisüsteemi bilansis ja neid kasutatakse vajadusel (näiteks süsteemi rikete korral) tagavarana. reaktiivvõimsuse allikas. Seetõttu on nende paigaldamine esimese rühma võrkudesse piiratud.
Kõrgepingelised sünkroonmootorid (kompressormootorid, pumbajaamad jne) võetakse ettevõtte üldises reaktiivvõimsuse bilansis arvesse, kuid reeglina ei piisa nende reaktiivvõimsusest ning seejärel korvatakse puuduv reaktiivvõimsus. kondensaatoripangad.

Reaktiivvõimsuse bilansi tööstusettevõtte 6–10 kV sõlmes saab kirjutada järgmise suhtena:
Qvn + Qtp + ΔQ — Qsd — Qkb — Qe1 = 0,
kus Qvn on kõrgepingevastuvõtjate (HV) 6 — 10 kV arvutuslik reaktiivkoormus, Qtp on töökoja trafo alajaamade (TS) trafode toitel kuni 1 kV võrkude kompenseerimata koormuse võimsus Qn, ΔQ — reaktiivvõimsuse kaod võrk 6 — 10 kV, eriti GPP trafodes.
Kondensaatorite kasutamine pingetel 6–10 kV vähendab reaktiivvõimsuse kompenseerimise kulusid, kuna madalpinge kondensaatorid on tavaliselt kallimad (võimsuse kvarta kohta).
Tööstusettevõtete madalpingevõrkudes (kuni 1 kV), millega on ühendatud suurem osa reaktiivvõimsust tarbivatest elektrienergia vastuvõtjatest, jääb koormuse võimsustegur vahemikku 0,7 — 0,8. Need võrgud on elektriliselt kaugemal elektrisüsteemi toiteallikatest või kohalikust koostootmisjaamast (CHP).Seetõttu paiknevad reaktiivvõimsuse ülekandekulude vähendamiseks kompensatsiooniseadmed otse võrgus kuni 1 kV.

Spetsiifilise koormusega (šokk, järsult muutuv) ettevõtetes kasutatakse teise rühma võrkudes lisaks eelnimetatud kompenseerimisseadmetele ka filterkompenseerimis-, balansseerimis- ja filtritasakaaluseadmeid. Viimasel ajal kasutatakse pöörlevate kompensaatorite asemel üha enam staatilise reaktiivvõimsuse (STK) kompensaatoreid, mis koos võimsusteguri parandamisega võimaldavad stabiliseerida toitepinget.
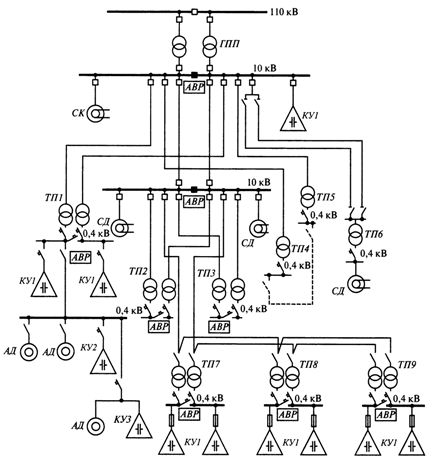
Riis. 1. Tasandusseadmete paigutamine tööstusettevõtte toitevõrkudesse: GPP - ettevõtte peamine alajaam, SK - sünkroonkompensaator, ATS - automaatne ülekandelüliti, KU1 - KB tsentraliseeritud reaktiivvõimsuse kompenseerimiseks, KU2 - KB reaktiivvõimsuse rühmakompenseerimiseks, KU3 — KB individuaalseks reaktiivvõimsuse kompenseerimiseks, TP1 -TP9 - töökoja trafo alajaamad, SD - sünkroonmootorid, AD - asünkroonsed mootorid
Enamiku ettevõtete teenindusvõrkudes kasutatakse reaktiivvõimsuse reguleerimiseks staatilisi kondensaatorpankasid. Sel juhul teostatakse tsentraliseeritud (KU1), grupi (KU2) või individuaalse (KU3) reaktiivvõimsuse kompenseerimine.
Seega saab reaktiivvõimsuse kompenseerimiseks kasutatava tööstusettevõtte toitesüsteemi reaktiivvõimsuse allikad paikneda nii, nagu on näidatud joonisel fig. 1.